


Year: 2011
-
Campus & Community
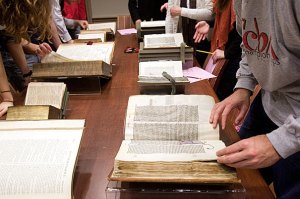
A look inside: Lowell House
With the holidays nigh, Lowell House residents celebrated with the Yule Dinner, where they observed some pagan traditions such as “bringing greens into homes at midwinter, kindling lights and fires at the darkest time of year, and feasting at table with loved ones,” according to House Master Diana Eck.

-
Campus & Community
Powerhouses in the making
With both the men’s and women’s squash teams still undefeated, the teams look to capitalize on their momentum when the season resumes after winter break.

-
Campus & Community
Inspired by their stories
Student who backs women’s causes aims to make a difference in the next election by working in national politics.

-
Arts & Culture
Adding art to academics
Modern dance instructor Liz Lerman uses a Harvard semester to cross disciplines, deepen understanding, promote research, and increase knowledge.

-
Campus & Community
Let the admissions begin
Seven hundred and seventy-two students have been admitted to the Harvard College Class of 2016 through the Early Action program, which was reinstated this year after a four-year absence.

-
Campus & Community
Sampling Harvard, in essays
It is sometimes said that youth is wasted on the young. It also could be said that college sometimes is wasted on students, and that only after graduating does a former student come to appreciate learning. For those wishing to revisit the college classroom, or those who never had the opportunity, there is “The Harvard…
-
Campus & Community
Gen Ed connects the dots of life
Harvard’s Program in General Education aims to tie what students learn at the College to the lives they will lead after graduation. A hit with both students and faculty, Gen Ed has expanded to more than 400 courses in less than three years, and now includes some of the most popular classes on campus.
-
Campus & Community
Students awarded for Japanese studies
Four Harvard students were awarded prizes in Japanese studies by Tazuko Ajiro Monane Memorial Fund and the Reischauer Institute of Japanese Studies.

-
Science & Tech
Of helixes, neurons, and chemicals
Science writer Carl Zimmer talked about the surprising number of science-oriented tattoos gotten by scientists, who wear their love of science proudly, and his related book, “Science Ink: Tattoos of the Science Obsessed,” during a lecture at the Harvard Museum of Natural History.

-
Science & Tech
Soft-bots
Harvard Professor George Whitesides and his research team have developed an array of “soft” robots based on natural forms, including squids and starfish, that may one day be used to aid disaster recovery efforts by squeezing into the rubble left by an earthquake to locate survivors, or as a way to free up a surgeon’s…

-
Science & Tech
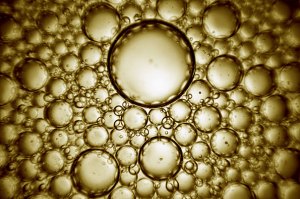
Slow road to stability for emulsions
By studying the behavior of tiny particles at an interface between oil and water, researchers at Harvard have discovered that stabilized emulsions may take longer to reach equilibrium than previously thought.
-
Arts & Culture
A show fit for royalty
“The Snow Queen,” the classic fairy tale by Hans Christian Andersen, has been reworked in an imaginative stage adaptation at the American Repertory Theater. It will be performed through Dec. 31.

-
Campus & Community
Winter bounty
As winter break approaches, College officials strongly encourage students to spend time away from campus and to reconnect with friends and family. But those hungry for something to do can return on Jan. 13 for Wintersession 2012, 10 days of innovative programming for students interested in exploring a creative passion, developing a new skill, or…

-
Science & Tech
Creative pursuits
Projects on display at the CS 50 Fair ranged from a tool that limits procrastination, to a website that displays longitudinal market capitalization data, to an application that helps with music composition.

-
Health
Harvard professors partner in unique approach
The first-of-its-kind strategy is credited for curing at least five of 10 children at a rural Rwandan hospital; two others are in remission while receiving chemotherapy, and three children have died. The long-distance team approach was designed by Harvard Medical School instructor in medicine Sara Stulac, director of pediatrics for Partners In Health.

-
Science & Tech
When plants may not help
Large-scale increases in forest cover in North America and Eurasia — proposed by some analysts as a way to cut climate change — could hurt the environment by shifting rainfall patterns across the globe, Harvard study says.

-
Nation & World
When to help a patient die
Legal analysts at a Harvard Medical School forum differ over whether a law allowing death with dignity or assisted suicide for terminally ill patients is right for Massachusetts. But they agreed that similar laws in Oregon and Washington have not proven to be a “slippery slope” that endangered vulnerable patients.

-
Health
The plight of adolescents, worldwide
Children and youths globally are suffering from neglect and abuse, living on the streets, being recruited into militias, and contracting serious ailments. A two-day conference examined the troubles facing the world’s adolescents.

-
Science & Tech
Thinking green, and thinking big
At the first Harvard Thinks Green, six Harvard professors gathered at Sanders Theatre to seek big solutions for complex and potentially intractable problems such as climate change.

-
Arts & Culture
Unraveling a brutal custom
A research team at the Radcliffe Institute for Advanced Study is debunking myths surrounding the brutal practice of foot binding young women in China, tying it to handwork and weaving rather than marriage prospects.

-
Campus & Community
Statement from Katie Lapp, Harvard Executive Vice President, regarding HEI Hotels & Resorts
On Dec. 9, Katie Lapp, Harvard executive vice president, released a statement regarding HEI Hotels & Resorts.
-
Campus & Community
Two named ACM fellows
Susan Landau, a visiting scholar in computing science, and Herchel Smith Professor of Computer Science Margo Seltzer were two of 46 people who were recently named fellows by the Association for Computing Machinery.
-
Campus & Community
HMS’s Louise Ivers honored
Harvard Medical School (HMS) Assistant Professor Louise Ivers was awarded the Bailey K. Ashford Medal by the American Society of Tropical Medicine and Hygiene.

-
Campus & Community
Purple bins hold hope for children
Harvard has joined forces with the Brighton-based nonprofit Cradles to Crayons (C2C) to collect coats and winter gear for distribution to local children in need this winter.

-
Campus & Community
Building the Harvard Library
The Harvard University Library’s senior leadership team is now in place, an important step in the transition process that will set the course for the library’s future.

-
Health
Traumatic injury sets off a ‘genomic storm’
Harvard researchers are among a nationwide team that has found serious traumatic injuries, including major burns, set off a “genomic storm” in human immune cells, altering around 80 percent of the cells’ normal gene expression patterns.
-
Arts & Culture
The wisdom of William James
Physician and Harvard Medical School Professor Arthur Kleinman delivered Harvard Divinity School’s annual William James Lecture, exploring the philosopher’s importance in the area of moral wisdom.

-
Nation & World
The import of civic education
Civic education, an important element for democracy to flourish, has fallen to public schools, universities, and colleges to provide in recent years. A Harvard panel discussed what’s required for the citizenry to be educated to make informed decisions.

-
Nation & World
Divinity School student in documentary
Sonya Soni, a Harvard Divinity School student, is featured in the documentary “Keep a Child Alive with Alicia Keys,” which airs throughout December on Showtime.

-
Nation & World
Germany, again a linchpin
For the third time in a century, Germany stands ready to change the fortunes of Europe — this time, analysts believe, for the better, said a founder of Harvard’s Minda de Gunzburg Center for European Studies.
