

Tag: Soft Robots
-
Science & Tech
A soft touch
A new rubber computer combines the feel of a human hand with the thought process of a traditional computer, replacing the last hard components in soft robots. Now, soft robotics can travel where metals and electronics cannot — high-radiation disaster areas, outer space, and deep underwater — and turn invisible to the naked eye or…

-
Campus & Community
Wood recognized with Planck-Humboldt Medal
Harvard engineer and roboticist Robert Wood is honored with the newly created Max Planck-Humboldt Medal for his role and accomplishments in the field of soft robotics.

-
Science & Tech
Soft multifunctional robots get really small
A team of researchers has created a soft, animal-inspired robot that can safely be deployed in difficult-to-access environments, such as in delicate surgical procedures in the human body.

-
Science & Tech
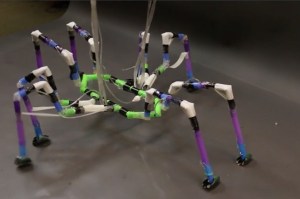
From drinking straws to robots
Inspired by arthropod insects and spiders, scientists George Whitesides and Alex Nemiroski have created a type of semi-soft robot capable of walking, using drinking straws, and inflatable tubing. The team was even able to create a robotic water strider capable of pushing itself along the water’s surface.
-
Campus & Community
Reader favorites for 2014
In 2014, the Harvard Gazette featured major news from the University. From treatments for diabetes and depression to snapshots of Commencement, the Gazette captured the essence of the Harvard community.

-
Science & Tech
Build your own bot
A new resource provides both experienced and aspiring researchers with the intellectual raw materials needed to design, build, and operate robots made from soft, flexible materials.

-
Science & Tech
Cutting the cord on soft robots
Researchers at Harvard’s School of Engineering and Applied Sciences and the Wyss Institute for Biologically Inspired Engineering have developed the world’s first untethered soft robot — a quadruped that can stand up and walk away from its designers.

-
Science & Tech
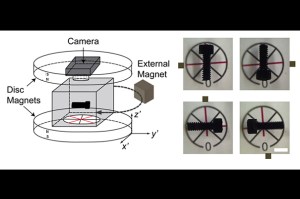
Magnetic attraction
Harvard scientists have developed a system for using magnetic levitation technology to manipulate nonmagnetic materials, potentially enabling manufacturing with materials that are too fragile for traditional methods.
-
Science & Tech
Using explosions to power soft robots
Using small explosions produced by a mix of methane and oxygen, researchers at Harvard have designed a soft robot that can leap as much as a foot in the air.
-
Science & Tech
Robots with lift
Using small explosions produced by a mix of methane and oxygen, researchers at Harvard have designed a soft robot that can leap as much as a foot in the air. That ability to jump could one day prove critical in allowing the robots to avoid obstacles during search and rescue operations.

-
Science & Tech
Soft robots go for color, camouflage
Researchers have developed a system — inspired by nature — that allows soft robots to either camouflage themselves against a background, or to make bold color displays. Such a “dynamic coloration” system could one day have a host of uses, ranging from helping doctors plan complex surgeries to acting as a visual marker to help…

-
Science & Tech
Soft-bots
Harvard Professor George Whitesides and his research team have developed an array of “soft” robots based on natural forms, including squids and starfish, that may one day be used to aid disaster recovery efforts by squeezing into the rubble left by an earthquake to locate survivors, or as a way to free up a surgeon’s…
