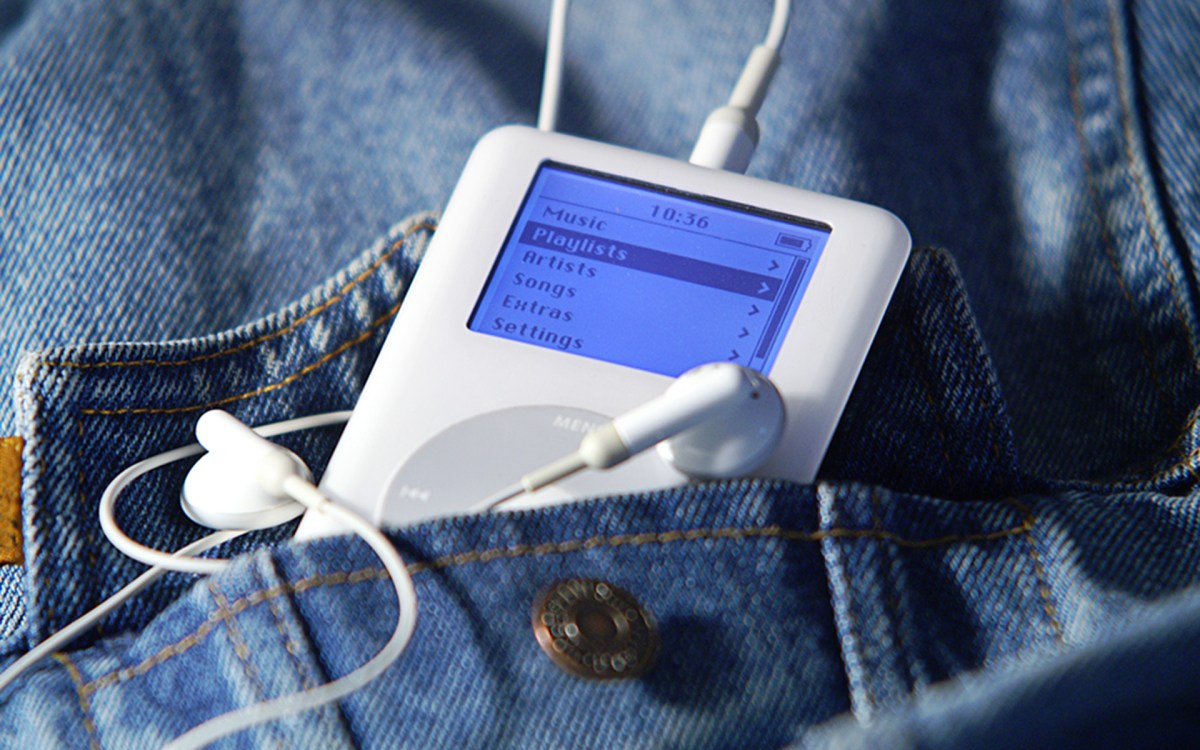
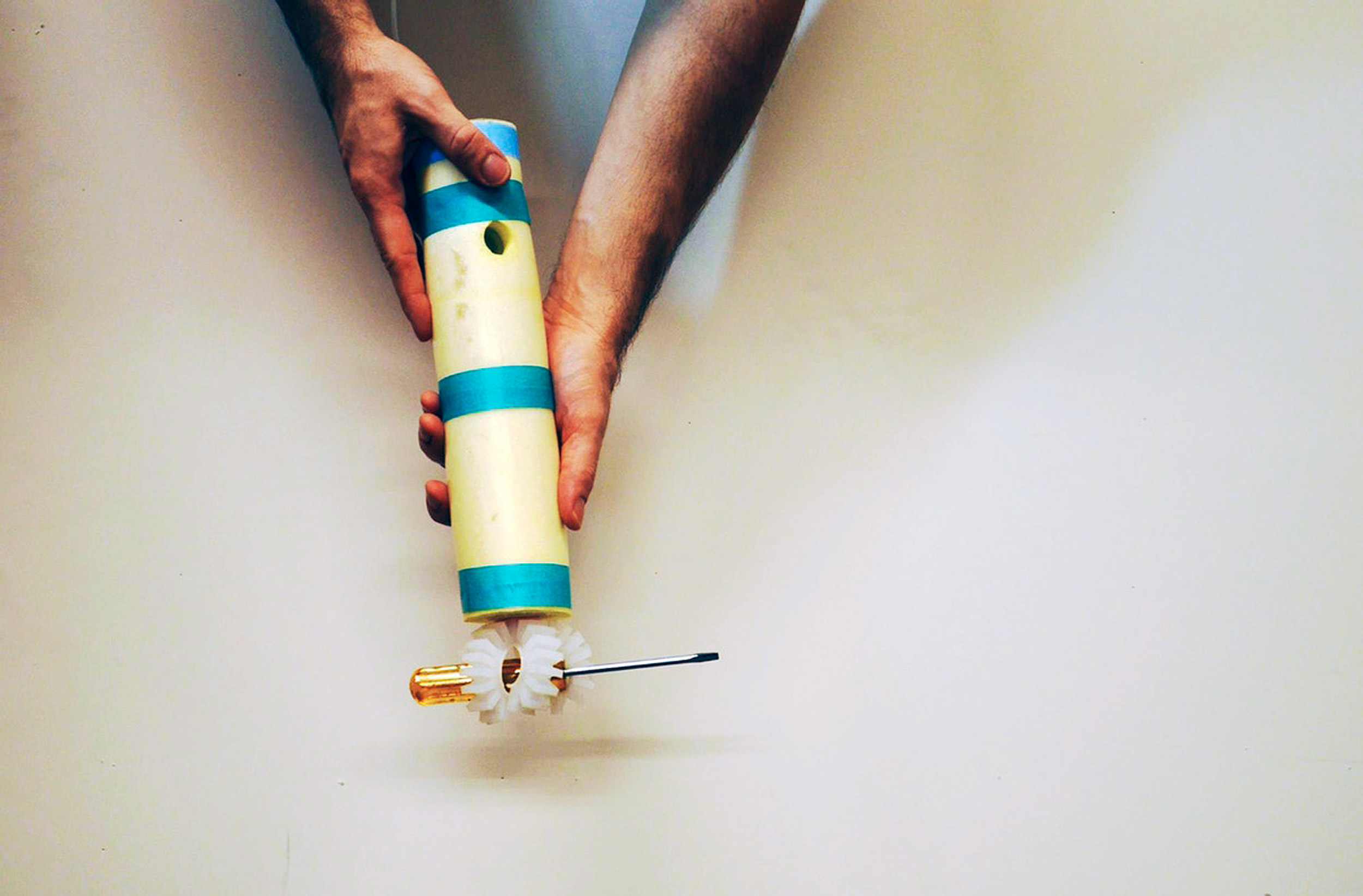
The toggle gripper holds a screwdriver.
Photo by Daniel Preston
Science & Tech
A soft touch
Pneumatic digital logic eliminates the last hard components from robots
A soft robot, attached to a balloon and submerged in a column of water, dives and surfaces, dives and surfaces, like a fish chasing flies. Soft robots have performed this kind of trick before. But unlike most soft robots, this one is made and operated with no hard or electronic parts. Inside, a soft, rubber computer tells the balloon when to ascend or descend. For the first time, this robot relies exclusively on soft digital logic.
In the past decade, soft materials have surged into the metal-dominant world of robotics. Grippers made from rubbery silicones are already used in assembly lines: Cushioned claws handle delicate fruit and vegetables like tomatoes and broccoli, or extract bottles and sweaters from crates. In laboratories, the grippers can pick up slippery fish, live mice, and even insects, lessening the need for human interaction.
Soft robots already require simpler control systems than their hard counterparts. The grippers are so compliant they cannot exert enough pressure to damage an object, and without the need to calibrate pressure, a simple on-off switch suffices. But until now, most soft robots still relied on some hardware: Metal valves that open and close channels of air that operate the rubbery grippers and arms, and a computer that tells those valves when to move.
Now, researchers have built a soft computer using just rubber and air. “We’re emulating the thought process of an electronic computer, using only soft materials and pneumatic signals, replacing electronics with pressurized air,” said Daniel J. Preston, first author on a paper published in PNAS and a postdoctoral researcher working with George Whitesides, the Woodford L. and Ann A. Flowers University Professor.
To make decisions, computers use digital logic gates — electronic circuits that receive messages (inputs) and determine reactions (outputs) based on their programming. Our circuitry isn’t so different: When a doctor strikes a tendon below our kneecap (input), the nervous system is programmed to jerk our leg (output).
Not only safer, soft robots are generally cheaper and simpler to make, lightweight, resistant to damage and corrosion, and durable.
Preston’s soft computer mimics this system using silicone tubing and pressurized air. To achieve the types of logic gates required for complex operations — in this case, NOT, AND, and OR — he programmed the soft valves to react to different air pressures. For the NOT logic gate, for example, if the input is high pressure, the output will be low pressure. With these three logic gates, Preston said, “You could replicate any behavior found on any electronic computer.”
The bobbing fish-like robot in the water tank, for example, uses an environmental pressure sensor (a modified NOT gate) to determine what action to take. The robot dives when the circuit senses low pressure at the top of the tank and surfaces when it senses high pressure at depth. The robot can also surface on command if someone pushes an external soft button.
Robots built with only soft parts have several benefits. In industrial settings, like automobile factories, massive metal machines operate with blind speed and power. If a human gets in the way, a hard robot could cause irreparable damage. But if a soft robot bumps into a human, Preston said, “You wouldn’t have to worry about injury or a catastrophic failure.” They can only exert so much force.

But soft robots are not only safer: They are generally cheaper and simpler to make, lightweight, resistant to damage and corrosion, and durable. Add intelligence and soft robots could be used for much more than just handling tomatoes. For example, a robot could sense a user’s temperature and deliver a soft squeeze to indicate a fever, alert a diver when the water pressure rises too high, or push through debris after a natural disaster to help find victims and offer aid.
Soft robots can also venture where electronics struggle, such as in high-radiation fields, like those in outer space and MRI machines or produced after a nuclear malfunction. In the wake of a hurricane or flooding, a hardy soft robot could manage hazardous terrain and noxious air. “If it gets run over by a car,” Preston said, “it just keeps going, which is something we don’t have with hard robots.”
Preston and his colleagues are not the first to control robots without electronics. Other research teams have designed microfluidic circuits, which can use liquid and air to create nonelectronic logic gates. One microfluidic oscillator helped a soft, octopus-shaped robot flail all eight arms.
Yet microfluidic logic circuits often rely on hard materials like glass or hard plastics, and they use such thin channels that only small amounts of air can move through at a time, slowing the robot’s motion. In comparison, Preston’s channels are larger — close to one millimeter in diameter — which enables much faster air-flow rates. His air-based grippers can grasp an object in a matter of seconds.
Microfluidic circuits are also less energy-efficient. Even at rest, the devices use a pneumatic resistor, which flows air from the atmosphere to either a vacuum or pressure source to maintain stasis. Preston’s circuits require no energy input when dormant. Such energy conservation could be crucial in emergency or disaster situations where the robots must travel far from a reliable energy source.
The rubber robots offer another enticing possibility: invisibility. Depending on which material Preston selects, he could design a robot that is index-matched to a specific substance. So, if he chooses a material that camouflages in water, the robot would appear transparent when submerged. In the future, he and his colleagues hope to create autonomous robots that are invisible to the naked eye or even sonar detection. “It’s just a matter of choosing the right materials,” he said.
While other fields chase higher power with machine learning and artificial intelligence, the Whitesides team turns away from mounting complexity. “There’s a lot of capability there,” Preston said, “but it’s also good to take a step back and think about whether or not there’s a simpler way to do things that gives you the same result, especially if it’s not only simpler, it’s also cheaper.”